
DEVSS
DEvelopment Vehicle for Scientific Survey
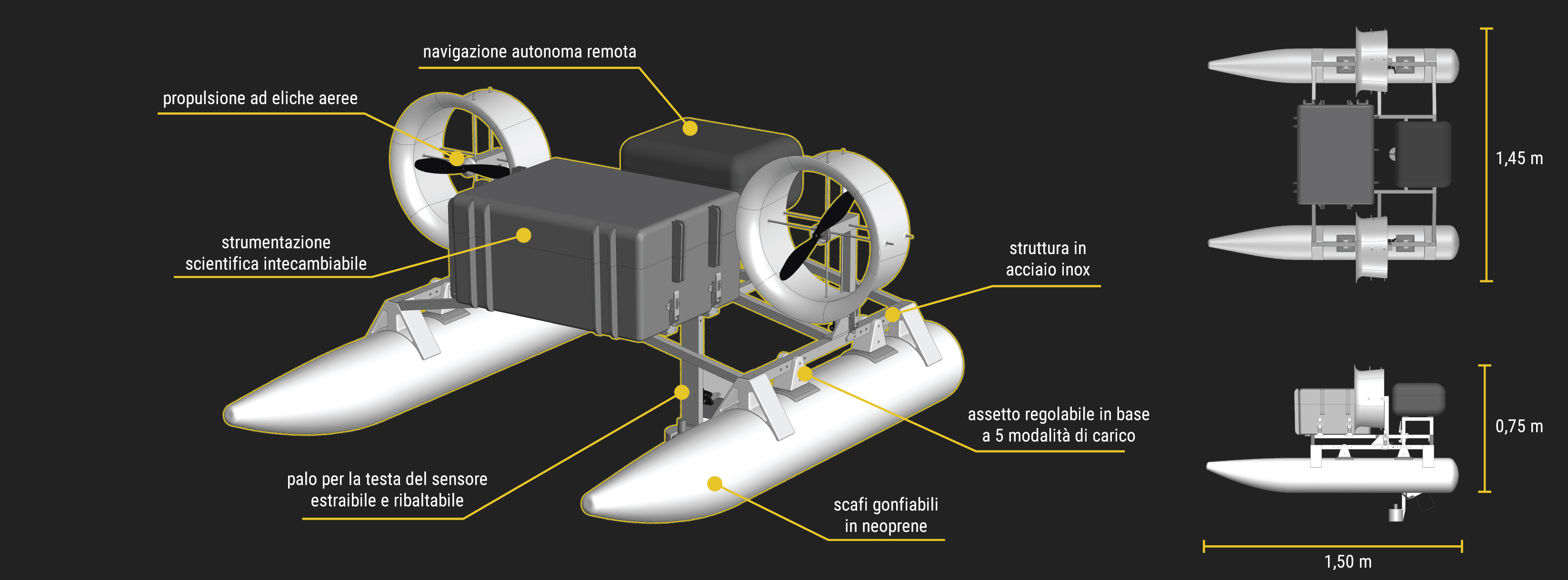
È un veicolo di superficie a navigazione autonoma, dotato di un sistema a doppia propulsione elettrica ed elica aerea, controllo remoto e sistema di posizionamento GPS. Può operare in un’area di circa 500 m ed è composto da un’anima tubolare in acciaio inox 304, montata su due gonfiabili in neoprene che ne assicurano il galleggiamento. La struttura è predisposta per l’alloggiamento di una valigetta ermetica (OrangeKit) che può ospitare dispositivi aggiuntivi, quali multi-beam, fotocamera, scanner etc. DEVSS è stato realizzato in collaborazione con l'Istituto Superiore per la Protezione e la Ricerca Ambientale (ISPRA) allo scopo di ottenere un sistema semiautonomo di monitoraggio ed analisi ambientale, ma le sue caratteristiche si prestano a molti altri utilizzi, ad esempio all’acquisizione ottica o acustica del fondale marino.
Caratteristiche
- Ingombro: 1,50x1,45 m (HxL)
- Pescaggio: max 15 cm circa
- Cairco utile: max 15 Kg
- Modalità di navigazione: Totalmente autonoma o controllo remoto
- Propulsione: 2 eliche aeronautca azionate da motori brushless a cassa rotante
- Raggio di azione: 500 mt
- Alimentazione: coppia batterie Lipo 15V a 32A con sistema di ricarica AC
Sistema di controllo
- Telemetria MAVLink a 868 Mhz
- Modulo GPS con bussola elettronica e supporto Galileo
- Radio Control RC 2.4 Ghz
- Real-time navigation control
- Mission planning software
Campi di applicazione
Gallery



